
Two turbocharged Seadoo jet skis, calibrated lakeside on MoTeC M1
Two turbo Rotax Seadoo builds taken to MoTeC M1 — boost control, knock safety and transient fuelling sorted, calibrated live on the water over a lakeside Wi-Fi network.
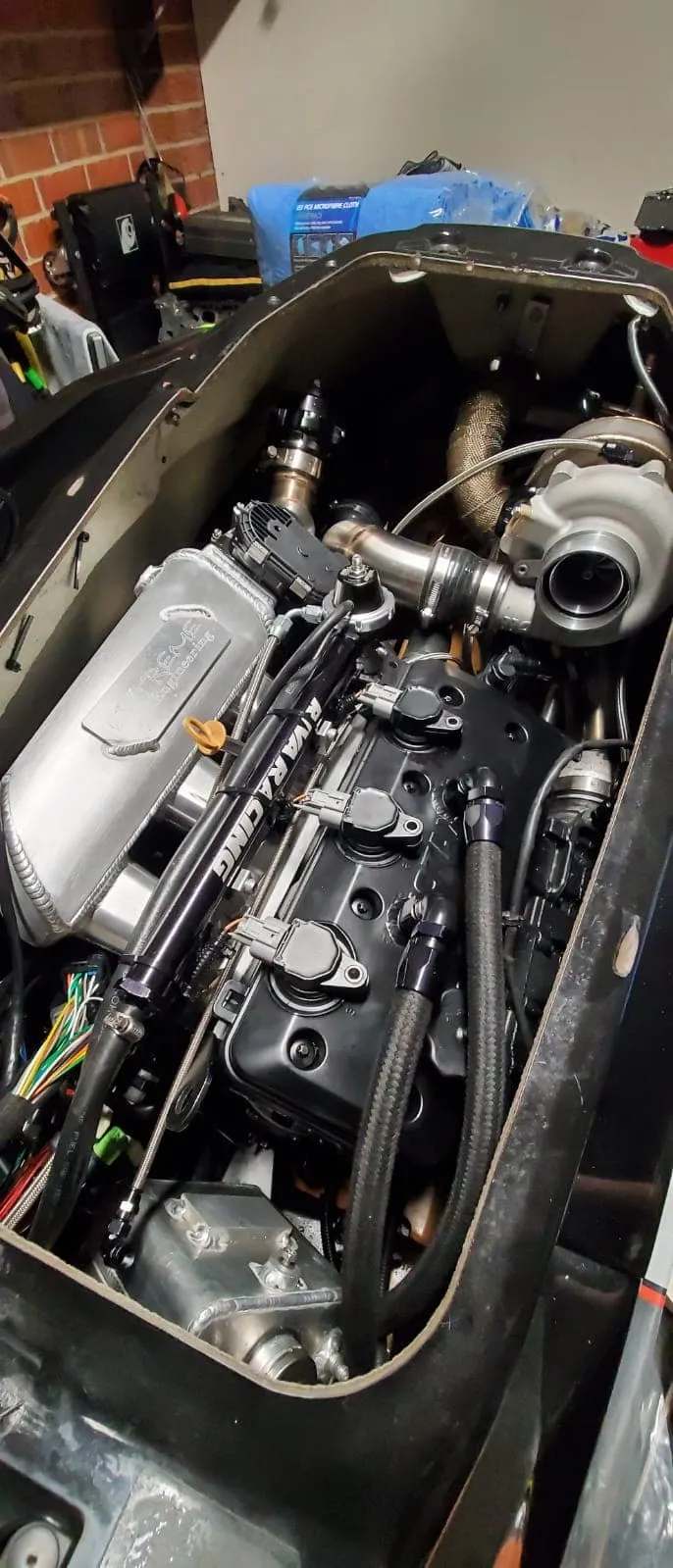
Rotax 1.5L & 1.6L - Garrett G25 - MoTeC M1
What the project set out to do
Calibrate two turbocharged Seadoo personal watercraft — a 1.6L Rotax on a Garrett G25-550 and a 1.5L Rotax on a Garrett G25-660 — for strong, repeatable, knock-safe performance in a punishing marine environment, ultimately on MoTeC M1 standalone management.
The engineering problem
The first ski (1.6L, G25-550) was calibrated initially on the stock ECU, which performed adequately, with the fuel system upgraded to 980cc injectors and a Walbro 460 pump. Two problems stood out. The G25-550 needed custom fabrication for proper installation and integration, and the O2 sensor placement was poor — it consistently failed from water contamination in the jet ski's exhaust environment, which hurt both reliability and feedback accuracy. On top of that, transient fuelling could not be properly optimised on the stock ECU.
The second ski (1.5L, G25-660) used the same fuel-system upgrades but targeted appreciably more boost, which made it the harder calibration — higher sensitivity to knock and to thermal load left a smaller margin for error.
The marine setting adds its own constraints: no dynamometer, water everywhere near the sensors, and validation that can only happen on the water under real load.
How it was calibrated
The first ski was migrated to a MoTeC M1 standalone to get past the stock ECU's limits. With boost control then fully managed in the MoTeC, behaviour became stable and predictable — the engine ran, in the operator's words, like clockwork. It was tuned to roughly 0.7 bar of boost on 98 RON pump fuel.
The second ski ran MoTeC M1 from the outset, tuned to 20 psi with two selectable boost settings. Given the higher boost, knock was continuously monitored with both the MoTeC ECU and a Plex Knock Monitor V2 for redundancy and safety. Both skis were calibrated cautiously off MoTeC data logging and Plex knock detection, with spark plugs inspected repeatedly throughout to validate combustion safety.
All of it was done on-site at a local lake. A distributed network of mobile routers around the lake kept logging and communication stable over live Wi-Fi, the operator ran the ski while I monitored and calibrated remotely from a fixed tuning station, and we stayed in contact by walkie-talkie throughout.
The result
Both jet skis ended up stable, predictable and knock-safe on MoTeC M1, validated on the water with redundant knock monitoring and repeated plug checks. The move to standalone resolved the transient-fuelling and boost-control limits of the stock ECU, and the lakeside Wi-Fi and walkie-talkie workflow let the calibration happen live in the real operating environment rather than guessed at on a bench.
Calibrating live on the water
There is no dyno for a jet ski, and a bench will not reproduce the real cooling water, exhaust environment or load. So the work was done where the ski actually runs. A mesh of mobile routers gave stable Wi-Fi across the lake, MoTeC logging streamed back to a fixed tuning station, and a walkie-talkie kept the operator and me coordinated through every pass. It is a deliberate, methodical way to tune in an environment that does not forgive shortcuts.
Footage
Questions about this project
Why move from the stock ECU to MoTeC M1?
The stock ECU handled the milder build adequately, but it could not properly optimise transient fuelling and its boost control was limited. MoTeC M1 took over boost control, made behaviour stable and predictable, and gave the headroom the higher-boost build needed.
How was knock managed at 20 psi?
Knock was monitored continuously with both the MoTeC ECU and a Plex Knock Monitor V2 for redundancy, the calibration was approached cautiously, and spark plugs were inspected repeatedly to confirm combustion safety.
How do you calibrate a jet ski with no dyno?
On the water. Tuning was done live at a lake using MoTeC data logging over a distributed Wi-Fi router network, with the operator riding and a walkie-talkie link to a fixed tuning station — validating in the real operating environment.
The engineering behind your workshop's calibrations
This kind of project is shared to show the depth behind the day-to-day work. Approved workshops calibrate directly with the same engineer. It is not a service sold to the public.